כבל הרחבה של מחבר Zכר M12 A-Coded בעל 5 פינים לנקבה עבור DeviceNet CANopen
מחבר כפול עם 5 פינים - נקבה בזווית ישרה לזכר ישר לפי תקן A Coding
אסמבלי כבל מגן עם מחבר זכר מיקרו-שינוי M12 לנקבה עבור NMEA2000
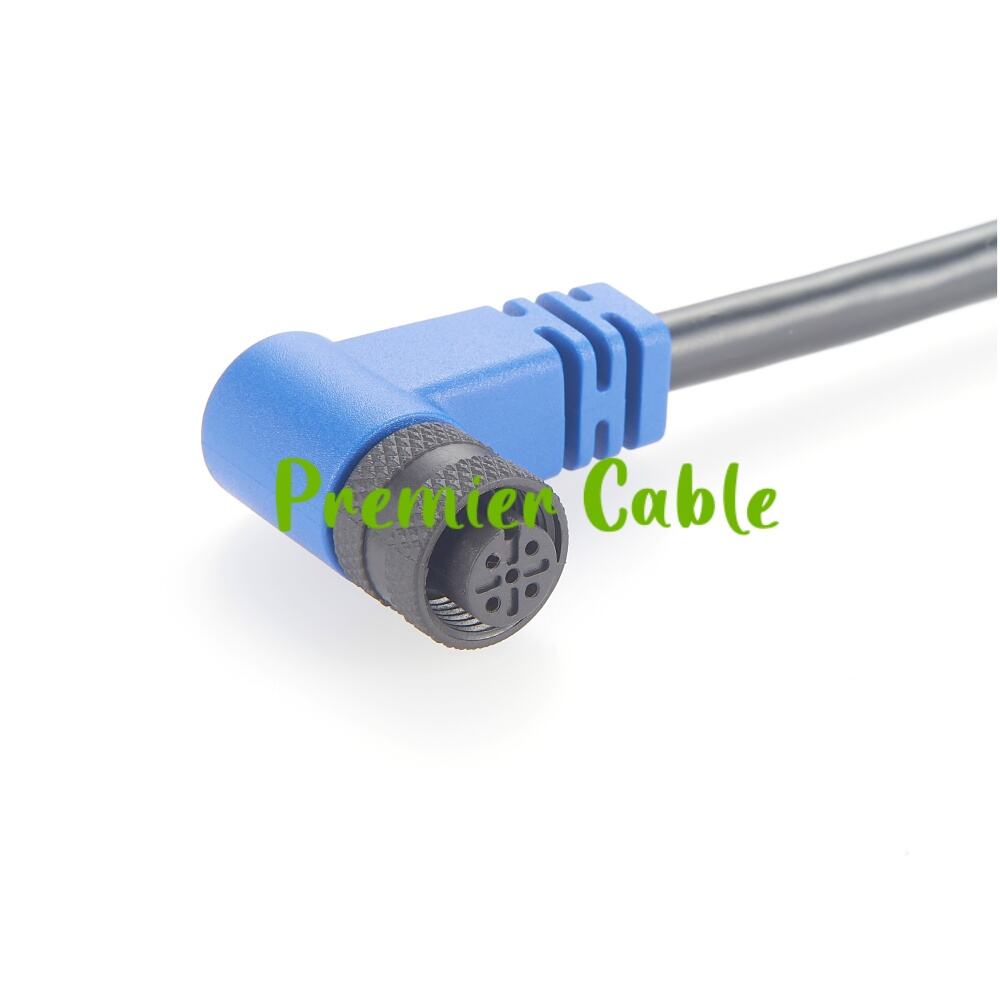
M12 A קוד 5 קוטבים, זכר ישר, נקבה מוטה ימינה, 90 מעלות
תֵאוּר
מבוא:
הכבל M12 עם תקן A-Code בעל חמשה פינים מזכר ישר לנקבה זווית ימנית הוא אסמבלה של כבלים ביצועים גבוהה שמשתמשת בצורה רחבה במערכות אוטומציה ובמערכות שליטה תעשייתיות. הוא מצויד במחבר M12 בעל חמישה פינים מזכר ישר באחד מהקצוות ובמחבר Nקבה בעל חמישה פינים בזווית ימנית בקצה השני, המאפשר התקנה גמישה במרחבים צפופים או מוגבלים. הוא תומך בפרוטוקולי תקשורת DeviceNet, CANopen, CAN Bus ו-NMEA 2000, מה שמבטיח העברה אמינה של נתונים והתחברויות יציבות בין מכשירים שונים.
מפרט:
| סוּג | כבל M12 CAN Bus CANopen NMEA2000 |
| שם המוצר | כבל M12 A-Coded 5 פינים זכר ישר לנקבה זוויתית ימנית עבור DeviceNet CANopen |
| מחבר 1 | M12 5 פינים ממין |
| מחבר 2 | M12 5 Pin נקבה |
| קידוד | קוד A |
| מגדר | זכר לנקבה |
| כיוון | מזכר ישר, נקבה זווית ימנית |
| פרוטוקול | DeviceNet, CANopen, CAN Bus, NMEA2000 |
| תְעוּדָה | UL, רוהס, ריץ' |
תכונות:
יישום:
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 CA
CA
 TL
TL
 IW
IW
 LT
LT
 SR
SR
 UK
UK
 VI
VI
 GL
GL
 AF
AF
 GA
GA
 CY
CY
 MK
MK
 HY
HY
 EU
EU
 BN
BN
 CEB
CEB
 NE
NE
 MY
MY
 SU
SU