Նկարագրություն
Ներածություն:
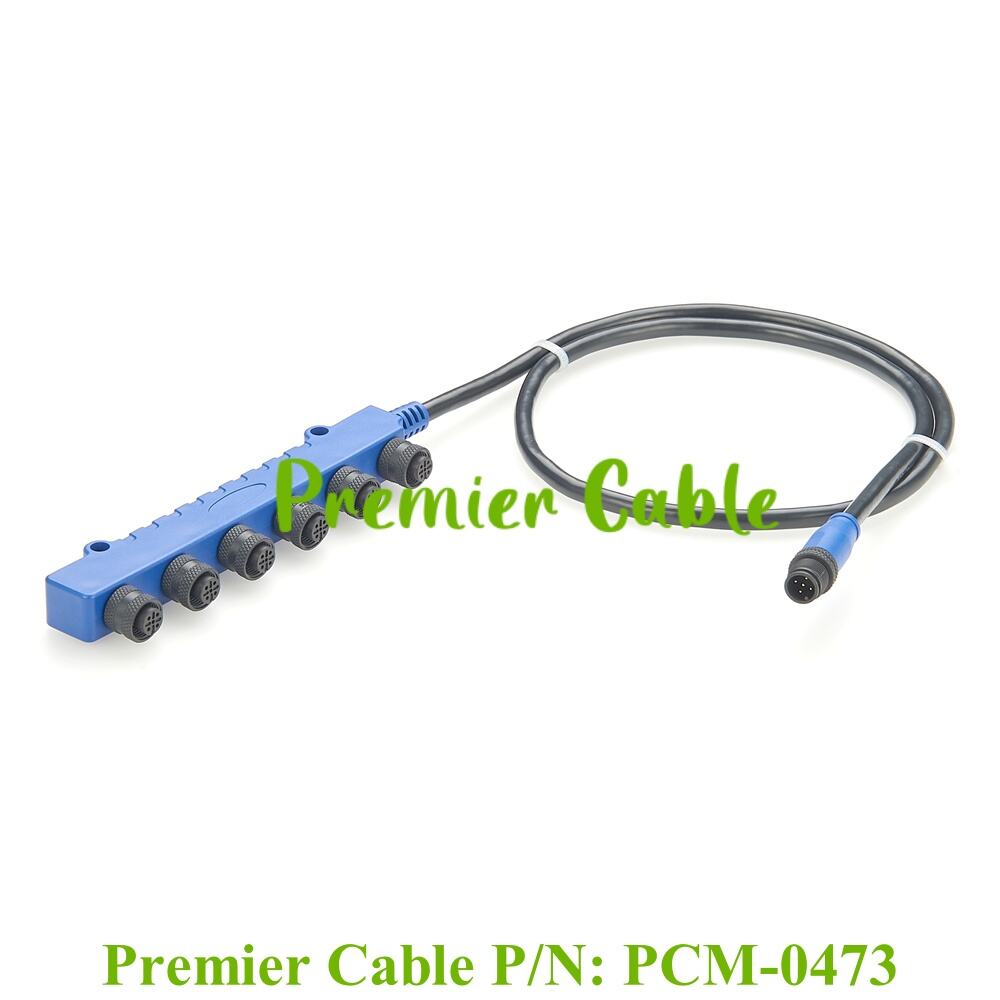
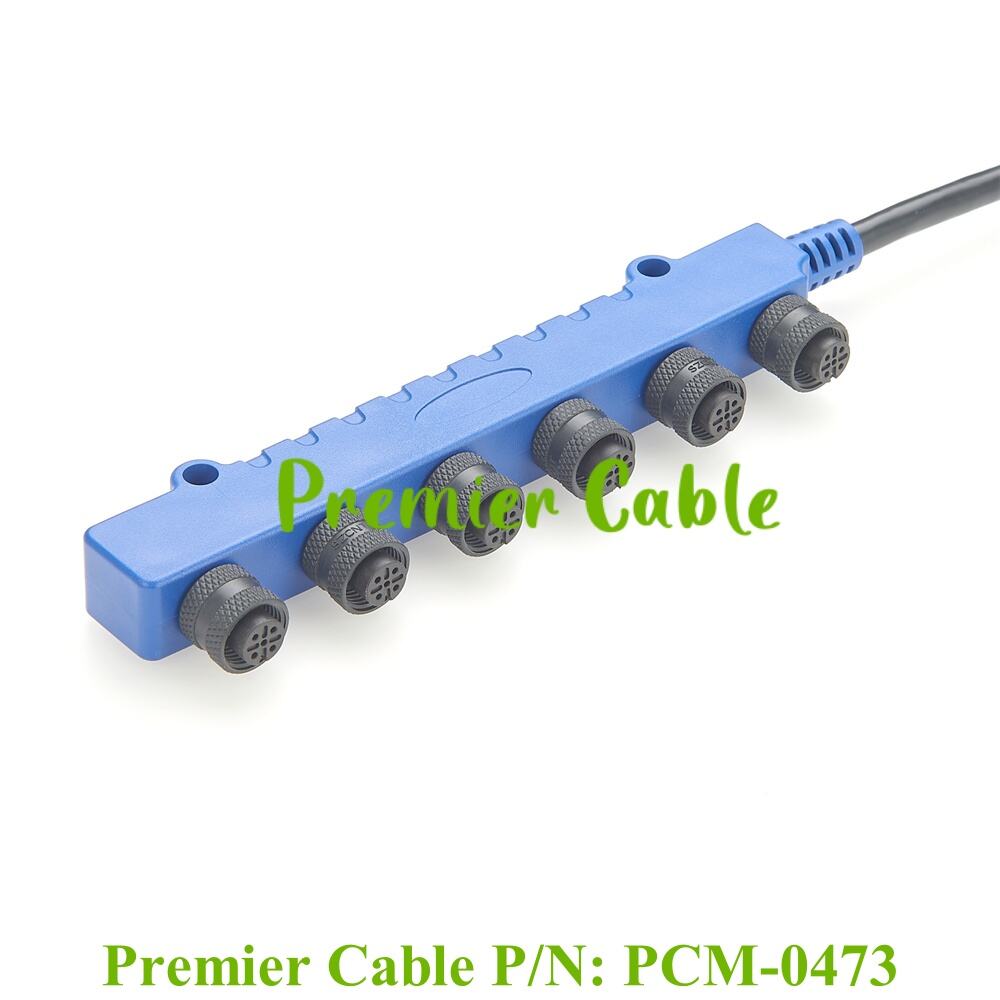
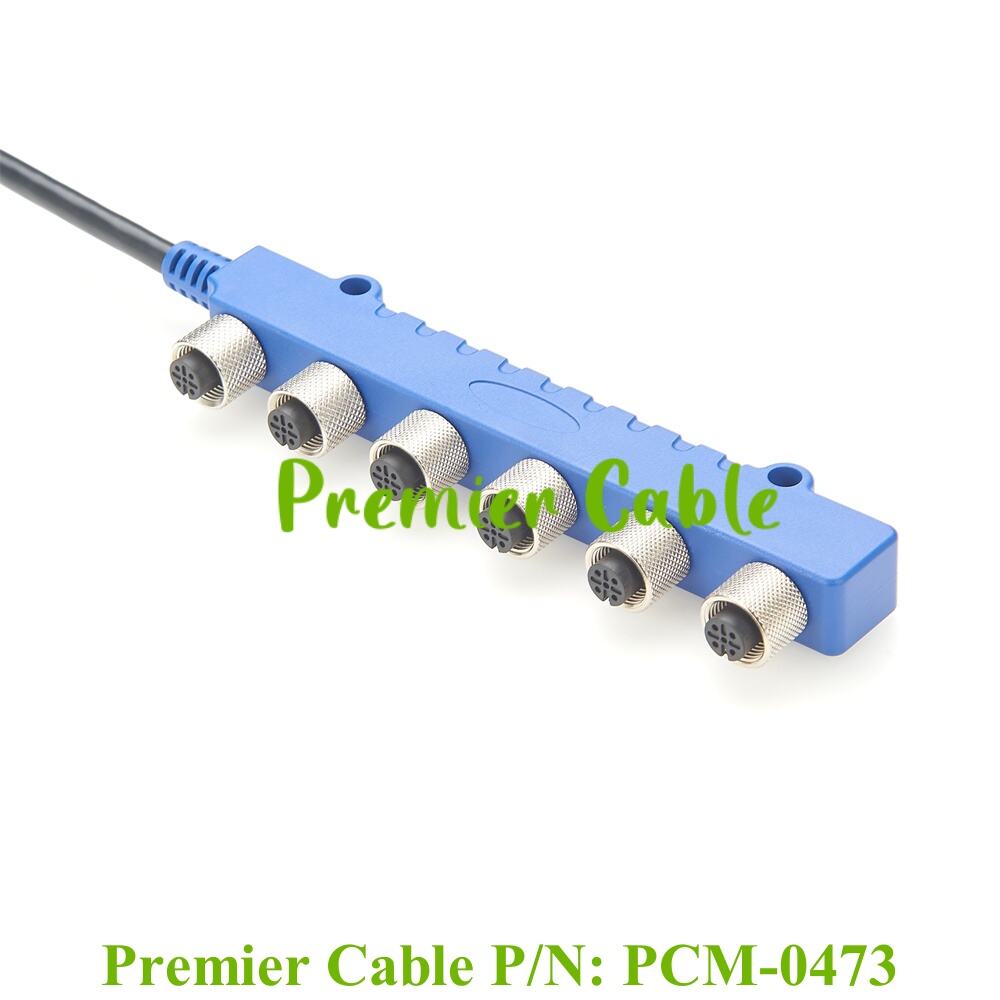
M12 徼𝑐hange MPIS Multiport Box-ը կոմպակտ և հասարակ միացումների հատված է, որը դիզայնված է NMEA2000, CAN Bus, CANopen և DeviceNet համակարգերի համար։ Այն հավաքված է ինդուստրիալ-ստանդարտ M12 5-pin միացումներով, բաժանում է միացումներ տարբեր ցանցային սարքերի համար, ինչպիսիք են սենսորները, ակտուատորները և GPS ստացողները։ Դա ապահովում է հեշտ տարածում և վարում տվյալների և էլեկտրական 旌անակների համար, ապահովելով կայուն միացում և արդյունավետ համակարգում կառուցվածքների համար ինդուստրիալ և ծովային միջավայրերում։ Premier Cable P / N: PCM-0473
Հատկություններ:
| Տեսակ |
M12 CAN Բուս CANopen NMEA2000 Կաբել |
| Ապրանքի անուն |
M12 Micro-Change MPIS Multiport Box NMEA2000 CAN Bus DeviceNet-ի համար |
| Դիրքի Համար |
PCM-0473 |
| Կոնեկտոր A |
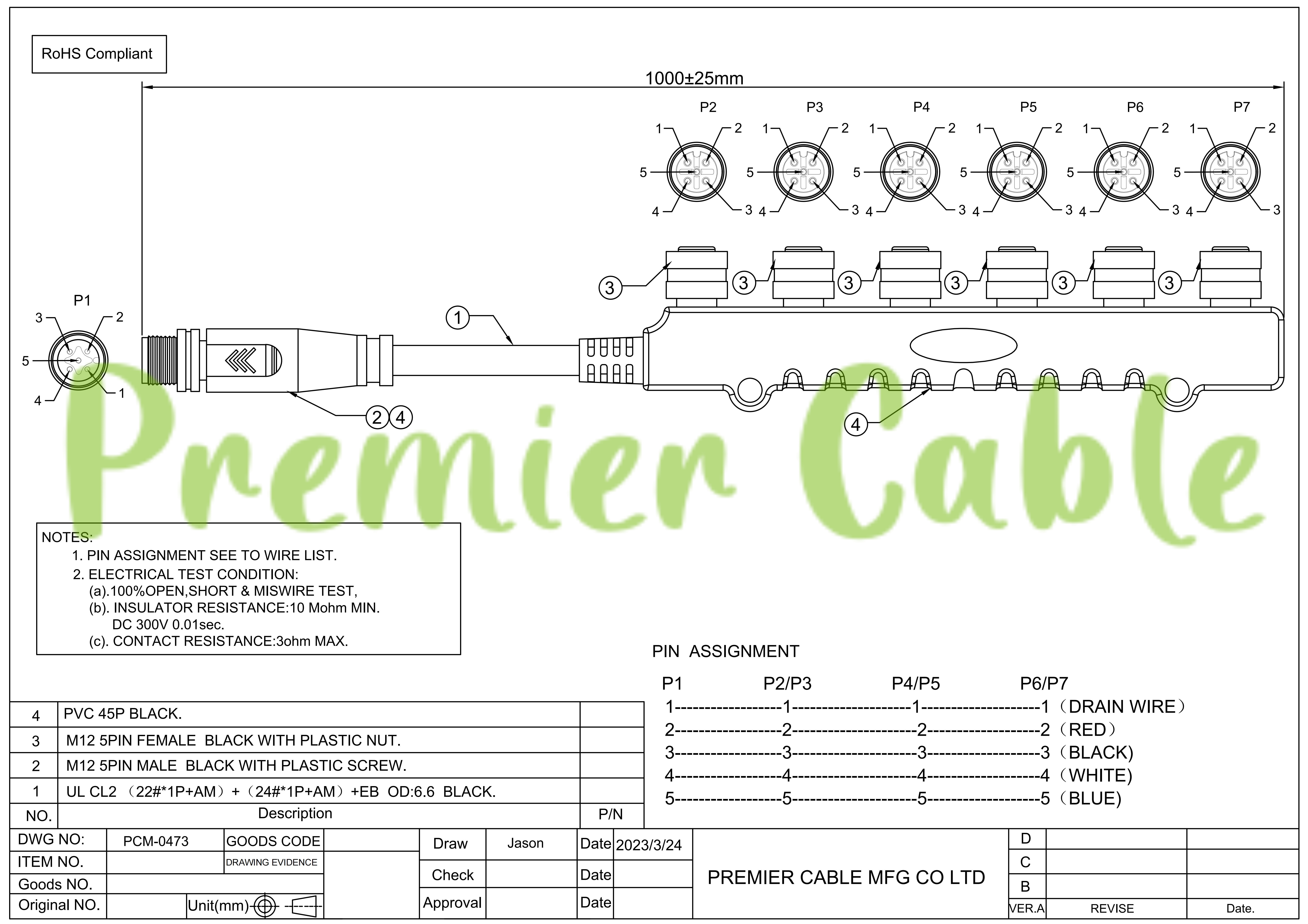
M12 徼change A-Code 5 Pin Male |
| Կապ B |
M12 徼-Change A-Կոդ 5 գրավոց իգական*6ՊԿՍ |
| Պինավորում |
1:1>>5:5, מקביל շրջան |
| Ընդհանուր երկարություն |
1մ, Կամ angepատկված |
| Կոնտակտ Մանրավորություն |
Պղինձ |
| Կոնտակտ Տանձավորում |
Golden-Plating |
| Պրոտոկոլ |
NMEA2000, CAN Bus, CANOpen, DeviceNet |
| Վկայական |
RoHS |
프로그ր램ի 특징:
- Երկու դասավորություններ՝ Մատակարարում է մի քանի M12 5-գրավոց պորտեր բազմաթիվ սարքերի միացման համար միայն մեկ հանգունակում, նվազեցնում է կայունականությունը և բարձրացնում է արդյունավետությունը:
- Սիգնալների և էներգիայի բաշխում: M12 Micro-Change MPIS Multiport Box-ը կարող է արդյունավետորեն բաշխել սիգնալները և էներգիան միացված սարքերի միջև, բարձրացնում է ցանցի արդյունավետությունը:
- Բազմակողմանի համատեղելիություն. Ենթադրում է NMEA2000, CAN Bus և DeviceNet ներառյալ տարբեր համակարգչային պրոտոկոլների համագումարումը՝ տարբեր ցանցային միջավայրերում տարբեր համակարգերի և սարքերի ինտեգրացիայի համար:
- Հաստատունություն և տատանումների դիմադրություն: Դիզայնված է անվանական գլուխացուցակի մեխանիզմով՝ կարողանալով կանգնել հաստատունության և տատանումների դեպքում՝ համոզված արդյունավետություն ապահովելու համար դժվար միջավայրերում:
- Էլեկտրոմագնիսական 섭ակագործության (EMI) պաշարում։ 娫榓ել տարածող կորդին, որպեսզի эффեկտիվորեն միջացնենք էլեկտրական շուրջքը կամ 섭եղումը, բարձրացնելով 旌幠դիրքի և համակարգի ընդհանուր վառանշանը:
Կիրառություն:
- Ռոբոտիկա: Օգտագործվում է ռոբոտային համակարգերում՝ միացնելու համար բազմաթիվ սենսորներ և ակտուատորներ՝ ճշգրիտ կառավարում և տվյալների փոխանցում:
- 娿րամանքային համոզում՝ Կապել տարբեր միջավայրային սենսորներ՝ չափում օդի ջերմաստիճանը, տարածվածությունը և կատարումը՝ կենտրոնացված կառավարման համակարգին՝ արդյոք արժեքավորում տարրական տվյալների հավաքում և վերլուծություն:
- Морское оборудование: Կապել տարբեր ծովային էլեկտրոնիկայի՝ GPS, sonar, խորության գտներ և radar համակարգեր՝ անընդհատ համակարգում և տվյալների փոխանցում:
- Ավտոմոբայլի ցանցային կապում: Հարավորել կապերը սենսորների, կառավարիչների և այլ կոմպոնենտների միջև՝ CAN Bus պրոտոկոլներ օգտագործող միավորներում՝ բարձրացնելով միավորի անալիտիկան և տարրական համարում:
Կառուցման գծագիր:
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 CA
CA
 TL
TL
 IW
IW
 LT
LT
 SR
SR
 UK
UK
 VI
VI
 GL
GL
 AF
AF
 GA
GA
 CY
CY
 MK
MK
 HY
HY
 EU
EU
 BN
BN
 CEB
CEB
 NE
NE
 MY
MY
 SU
SU