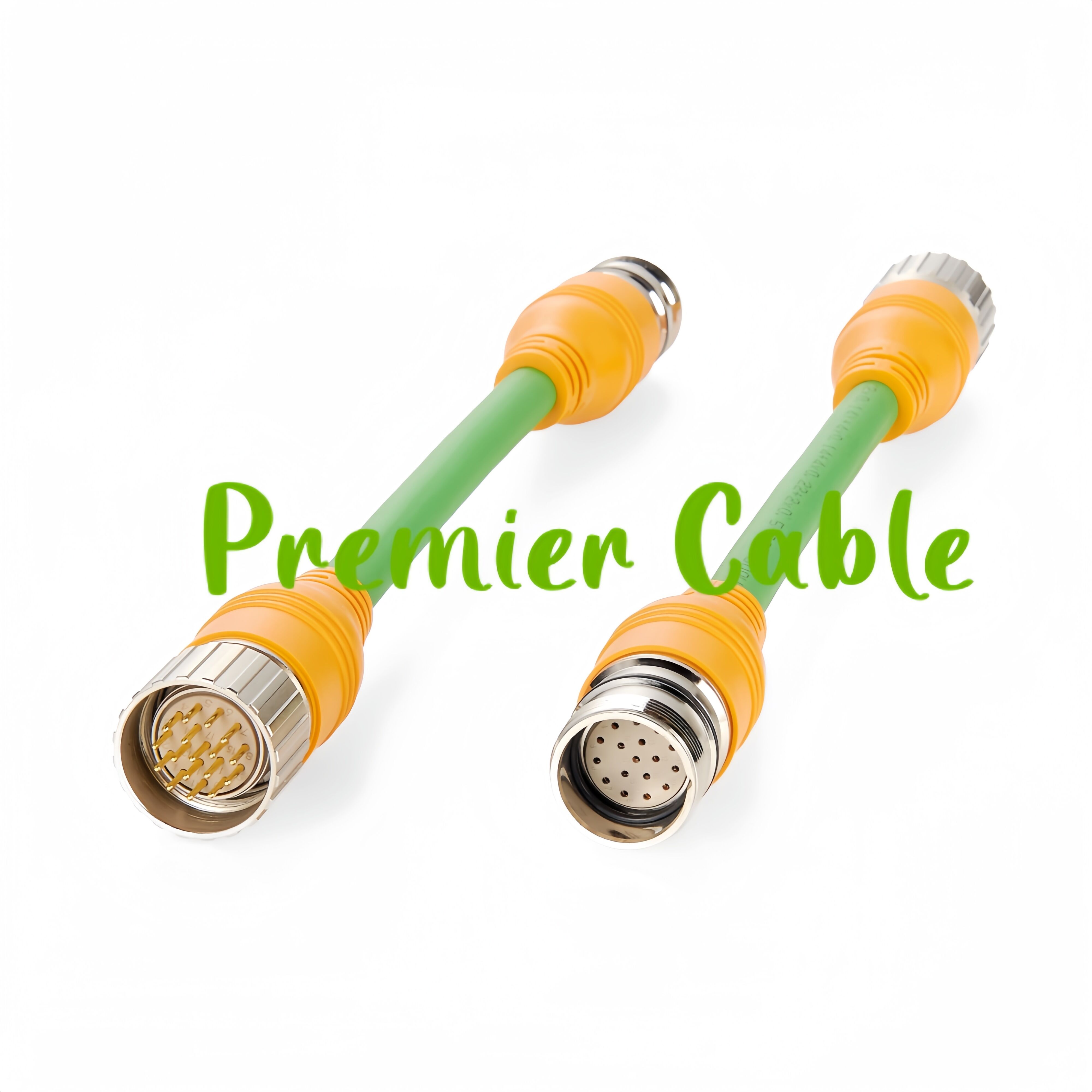
Cable de Retroalimentación de Servicio 17 Pines Macho Interno Conector M23 Recto está diseñado para aplicaciones como Actuadores de Sensores, Motores de Servicio y Codificadores. Puede proporcionar una transmisión de señales y conexiones de energía estables. Su material resistente al desgaste y a la corrosión permite su uso en entornos industriales severos. Cable Premier P/N: PCM-S-0486
Descripción
Introducción:
Cable de Retroalimentación de Servicio 17 Pines Macho Interno Conector M23 Recto está diseñado para aplicaciones como Actuadores de Sensores, Motores de Servicio y Codificadores. Puede proporcionar transmisión de señales y conexiones de energía estables. Su material resistente al desgaste y a la corrosión permite que los productos se utilicen en entornos industriales duros. Referencia Premier Cable: PCM-S-0486
Especificación:
| Tipo | Cable de Actuador de Sensor M23 de 17 Pines |
| Nombre del producto | Cable de Retroalimentación de Servicio 17 Pines Macho Interno Conector M23 Recto |
| Premier Cable N° de Parte | PCM-S-0486 |
| Longitud del cable | 0.25M, 1M, O Personalizado |
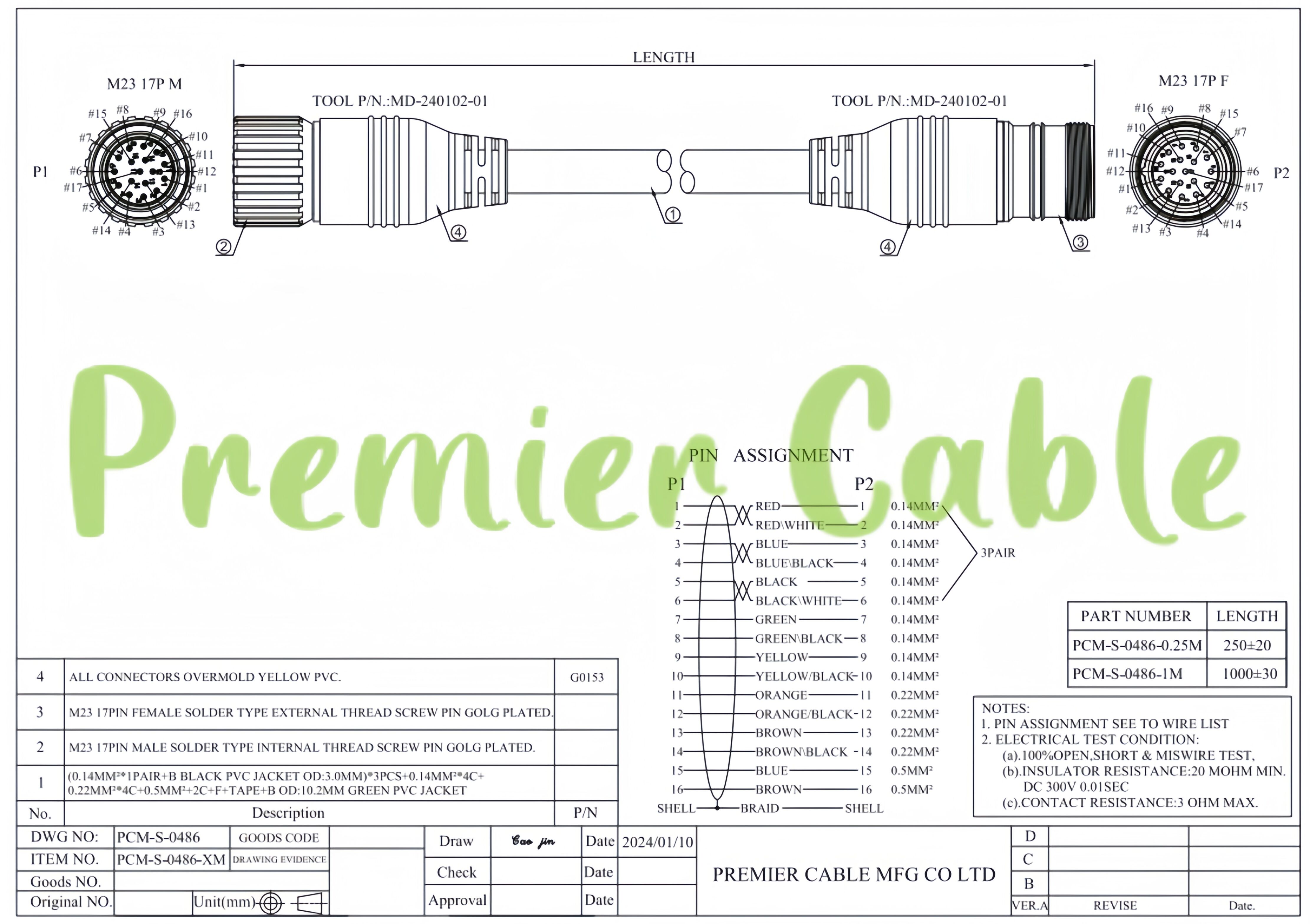
| conector a | 17 Pines Hembra con Rosca Externa |
| conector b | 17 Pines Macho con Rosca Interna |
| Resistencia al contacto | 3Ω Máx. |
| Resistencia del Aislante | 20MΩ Mín. CC 300V 0.01SEG |
| Material de la chaqueta | PVC |
| sobredosis | 3.0MM, 10.2MM |
| cable | (0.14MM²*1PAR+B; Negro)*3Pcs+0.14MM²*4C+0.22MM²*4C+0.5MM²+2C+F+Cinta+B; Verde |
Características:
El cable de retroalimentación de servo con conector interno M23 de 17 pines macho está diseñado para motores de servo, especialmente para transmitir señales de retroalimentación de codificadores o sensores de vuelta a los sistemas de control. A continuación se detallan sus características típicas para referencia:
Aplicación:
El cable de retroalimentación del servo M23 de 17 pines y 19 pines se utiliza a menudo para medir la posición y la velocidad del rotor del motor de servo y devolver estos datos al sistema de control para ajustar el estado de funcionamiento del motor en tiempo real, asegurando que se cumplan los requisitos de posición y velocidad esperados.
dibujo:
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 CA
CA
 TL
TL
 IW
IW
 LT
LT
 SR
SR
 UK
UK
 VI
VI
 GL
GL
 AF
AF
 GA
GA
 CY
CY
 MK
MK
 HY
HY
 EU
EU
 BN
BN
 CEB
CEB
 NE
NE
 MY
MY
 SU
SU