Beskrivelse
Introduktion:
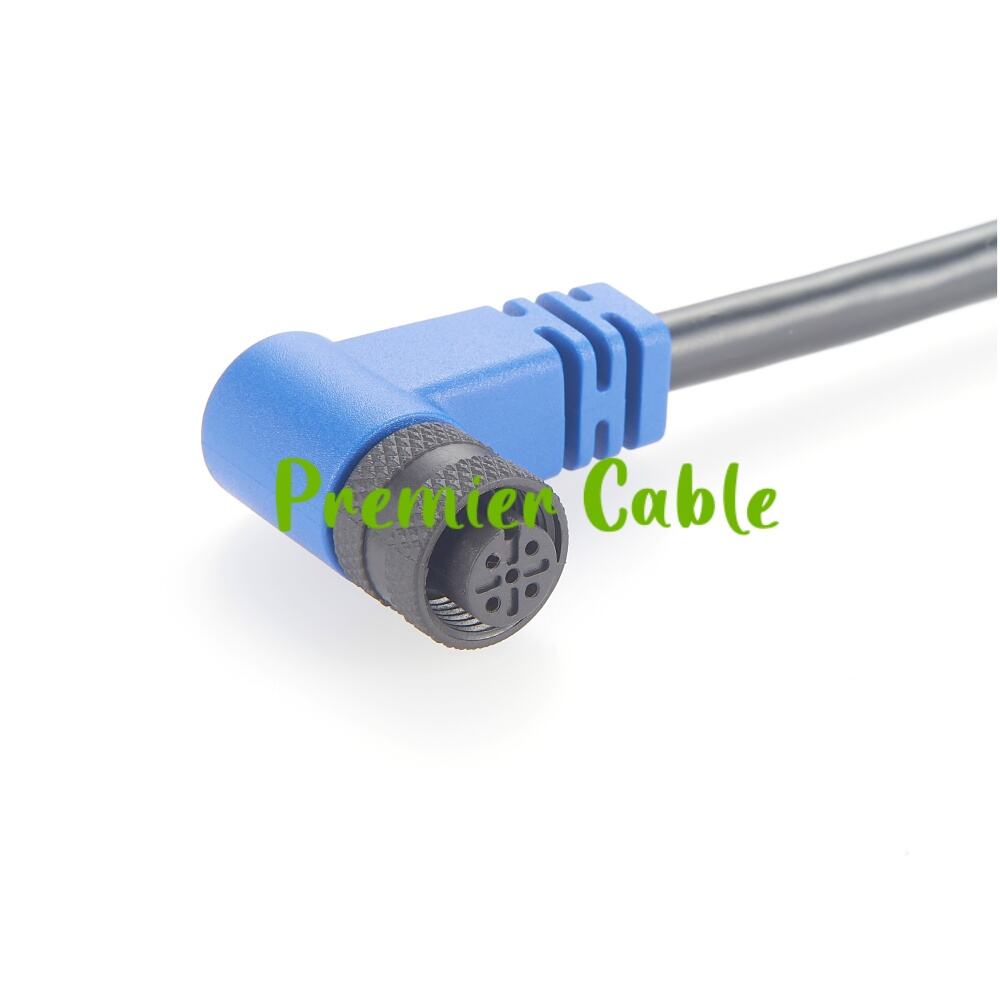
M12 A-kodet 5-polig kvadratisk kabel med høj ydelse, der bruges i industrielle automatiseringssystemer og kontrolsystemer. Den er udstyret med en lige M12 5-polig mandlig forbindelse på den ene side og en vinkelret M12 5-polig kvindelig forbindelse på den anden, hvilket gør installation mere fleksibel i stramme eller begrænsede områder. Den understøtter DeviceNet, CANopen, CAN Bus og NMEA 2000 kommunikationsprotokoller, hvilket sikrer pålidelig dataoverførsel og stabile forbindelser mellem forskellige enheder.
Specificering:
| TYPENAVN |
M12 CAN Bus CANopen NMEA2000 Kabel |
| Produkt Navn |
DeviceNet CANopen M12 A-Kodet 5 Pin Højrerettet Kvindelig Kabel til Maskulin Lige Kabel |
| Forbindningspunkt 1 |
M12 5 Pin Mændling |
| Forbindningspunkt 2 |
M12 5-polig kvindelig |
| kodning |
A-kodning |
| Køn |
mand til kvinde |
| vejledning |
Mandlig lige, kvindelig vinkelret |
| Protokol |
DeviceNet, CANopen, CAN Bus, NMEA2000 |
| Certifikat |
UL, Rohs, Reach |
Egenskaber:
- 90-grads design: M12-kvindelige forbindelserne er designet til en vinkelret struktur, hvilket forbedrer pladsudnyttelsen og gør det nemmere at installere i trange områder.
- Nem at bruge: Alle M12-forbindelser anvender en trådefastgørelsesmekanisme, hvilket giver brugere mulighed for at installere dem på kort tid.
- Fleksibilitet: Kombinationen af rette og retvinklede forbindere giver stor fleksibilitet ved kablerouting, egnet til forskellige installationskonfigurationer og -orienteringer.
- Protokolkompatibilitet: Kompatibel med DeviceNet og CANopen kommunikationsstandarder, hvilket sikrer pålidelig dataoverførsel og kommunikation i industrielle automatiseringssystemer.
Anvendelse:
- Sensorer og aktuatorer: Forbind sensorer, aktuatorer og andre enheder til controller, hvilket letter dataudveksling og nøjagtig kontrol i produktionprocesser.
- HVAC- og belysningsanlæg: Bruges i byggeautomatiseringssystemer, såsom HVAC og belysningskontrol, for at lettere pålidelig kommunikation og effektivt management af temperatur og belysning.
- Real-tid feedback: Understøtter real-tid dataudveksling mellem robotter og kontrolsystemer, hvilket giver opdateret feedback om robottydelsen og miljøforholdene.
- Dataloggere: Bruges til at forbinde dataloggere til netværksystemer, hvilket gør det muligt at indsamle og overføre driftsdata for detaljeret ydelsesanalyse og -overvågning.
 DA
DA
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 CA
CA
 TL
TL
 IW
IW
 LT
LT
 SR
SR
 UK
UK
 VI
VI
 GL
GL
 AF
AF
 GA
GA
 CY
CY
 MK
MK
 HY
HY
 EU
EU
 BN
BN
 CEB
CEB
 NE
NE
 MY
MY
 SU
SU