Адаптер M12 L-Тип с прав ъгъл Micro-Change е предназначен за NMEA2000, CAN Bus и DeviceNet. Той осигурява прочни и надеждни връзки за прехвърляне на данни и енергия в морски, индустриални и автомобилни условия, като разполага с L-образен дизайн, A-кодирани пинове и правоъгълен конфигурация за оптимална производителност и универсалност. Номер на продукта на Premier Cable: PCM-0464
Описание
Въведение:
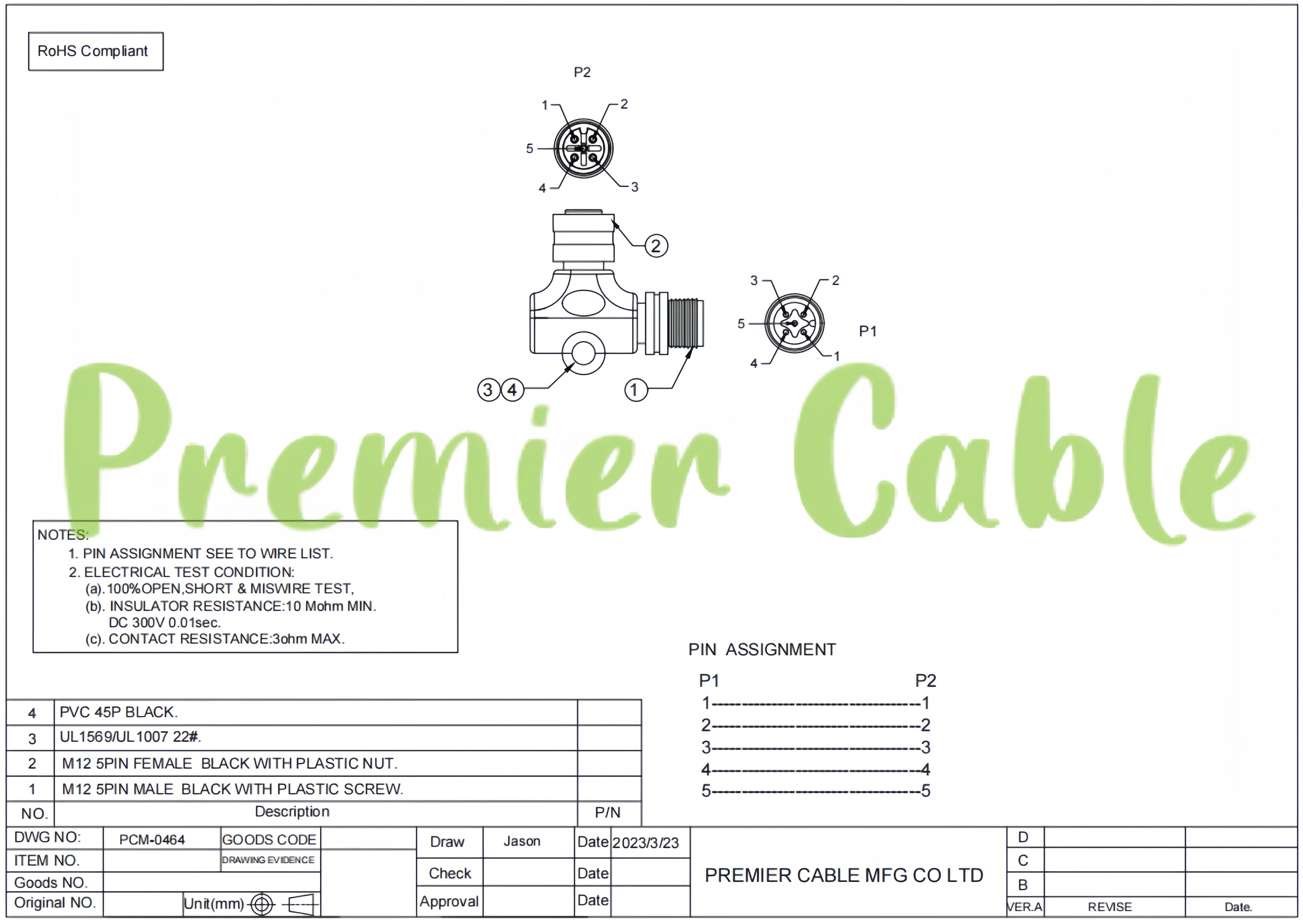
Адаптер M12 L-Тип с прав ъгъл Micro-Change е предназначен за NMEA2000, CAN Bus и DeviceNet. Той осигурява прочни и надеждни връзки за прехвърляне на данни и енергия в морски, индустриални и автомобилни условия, като разполага с L-образен дизайн, A-кодирани пинове и правоъгълен конфигурация за оптимална производителност и универсалност. Номер на продукта на Premier Cable: PCM-0464
Спецификация:
| Тип | Конектор от типа L M12 |
| Име на продукта | M12 L-тип Адаптер с прав ъгъл Микро-промяна за устройство NMEA2000 CAN Bus DeviceNet |
| Премиер Кабел P/N | PCM-0464 |
| Конектор A | M12 5 Пина, A Код, Мъжки |
| Конектор B | M12 5 Пина, A Код, Женски |
| IP класификация | IP67 |
| Съпротивление на контакта | 3Ω макс. |
| Спротивление на изолатора | 10 MΩ Мин. DC 300V 0.01СЕК |
| Приспособяваема температура | -25℃ до +80℃ |
| Начин на заключване | Резба |
Характеристики:
Приложение:
Теглене:
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 CA
CA
 TL
TL
 IW
IW
 LT
LT
 SR
SR
 UK
UK
 VI
VI
 GL
GL
 AF
AF
 GA
GA
 CY
CY
 MK
MK
 HY
HY
 EU
EU
 BN
BN
 CEB
CEB
 NE
NE
 MY
MY
 SU
SU






